2013
Minibuilders
The Institute for Advanced Architecture of Catalonia (IAAC), based in Barcelona, has, for some time now, been exploring and investigating the potentials of additive manufacturing (3D printing) applied to the architectural field, therefore the implemented on a larger scale. In this framework, the Institute put together a team of researchers with the aim of re-elaborating 3D printing techniques so as to overcome these limitations.
Year:
- 2013
Academic Programme
- Open Thesis Fabrication (now Postgraduate in 3D Printing Architecture)
Faculty
- Saša Joki?Petr Novikov
Students
- Shihui JinStuart MaggsDori SadanCristina Nan
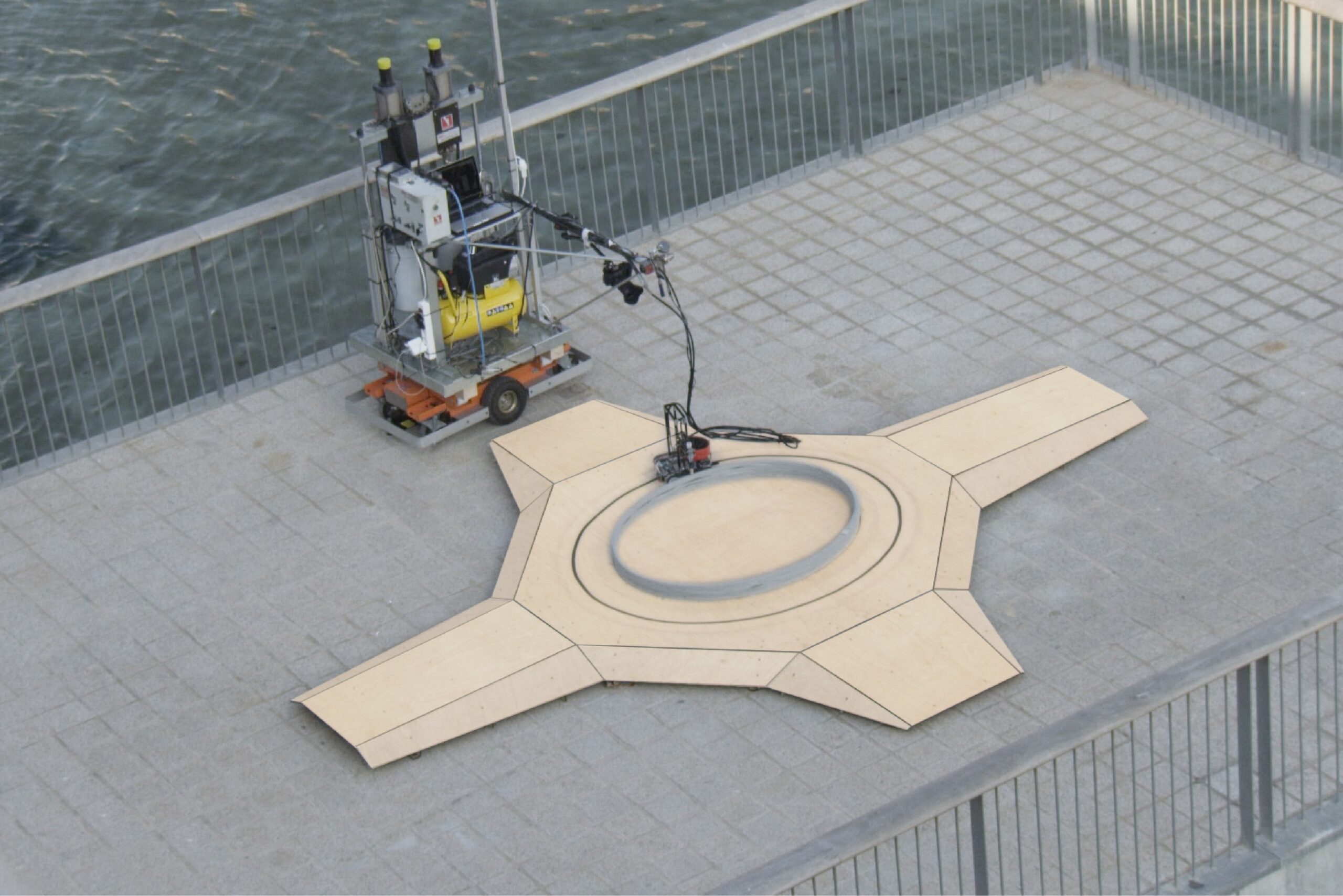
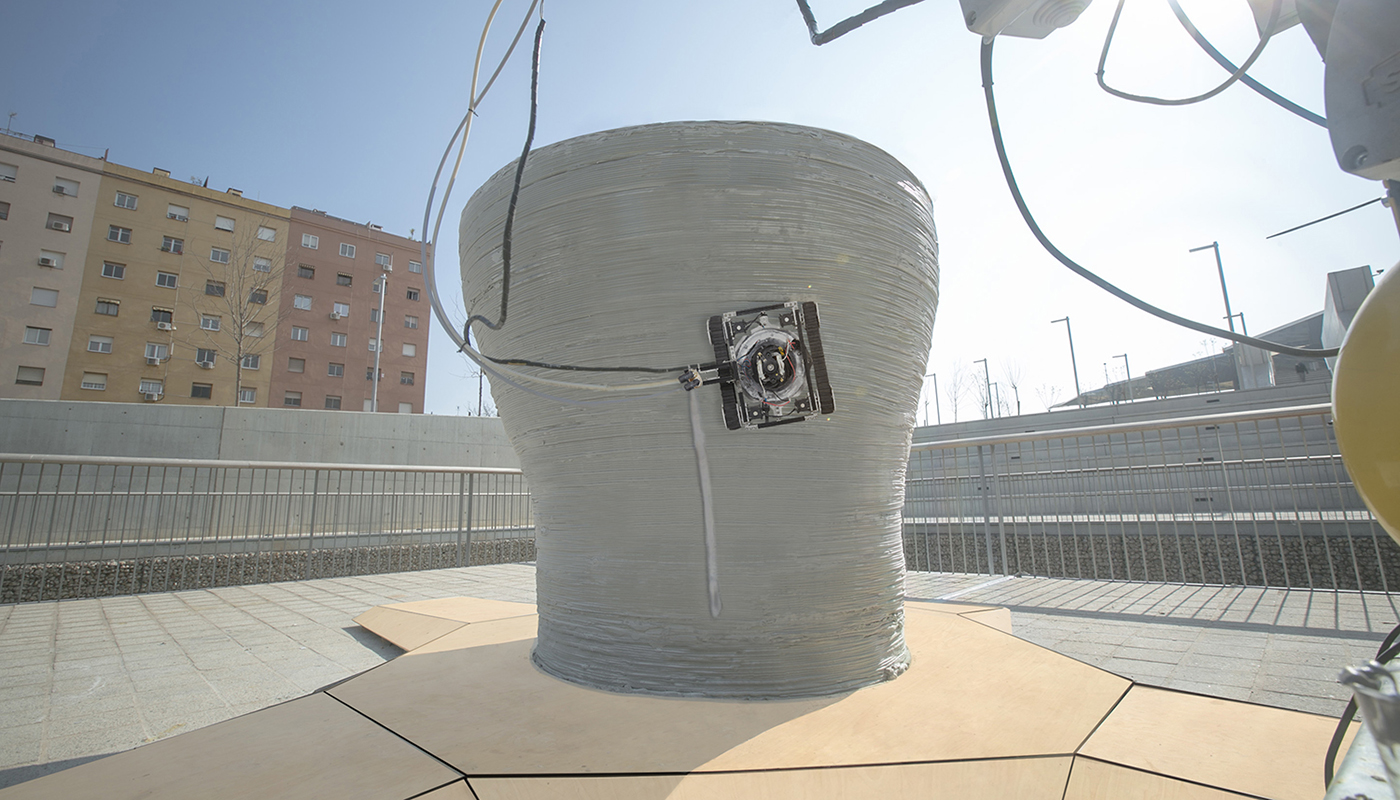
- This project was also made possible thanks to the sponsorship of SD Ventures, culminating with the production of a large-scale print. A 1.5-metre high prototype structure was printed in the exterior exhibition space of the Design Museum of Barcelona (Dhub), proving to be a positive outcome for the research entailed.
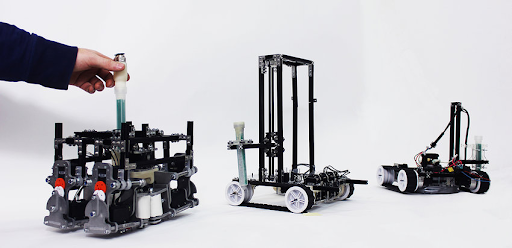
SMALL ROBOTS PRINTING LARGE-SCALE STRUCTURES
Robotics offer great potential towards innovation within the construction industry. However, in their current implementation applied to the architectural field, in particular, construction robotics, these systems all share a specific limitation: the objects they produce are linked to and constrained proportionally to the size of the machine. This methodology of production and construction is not scalable. In this sense, to create a house, using current construction robotics, the machine needed must have a work envelope as large as the house itself.
Hence, the project here below elaborated aims to address this particular limitation through the creation of a technology that is both scalable and capable of fabricating structures using tools that are independent of the final products shape of size.
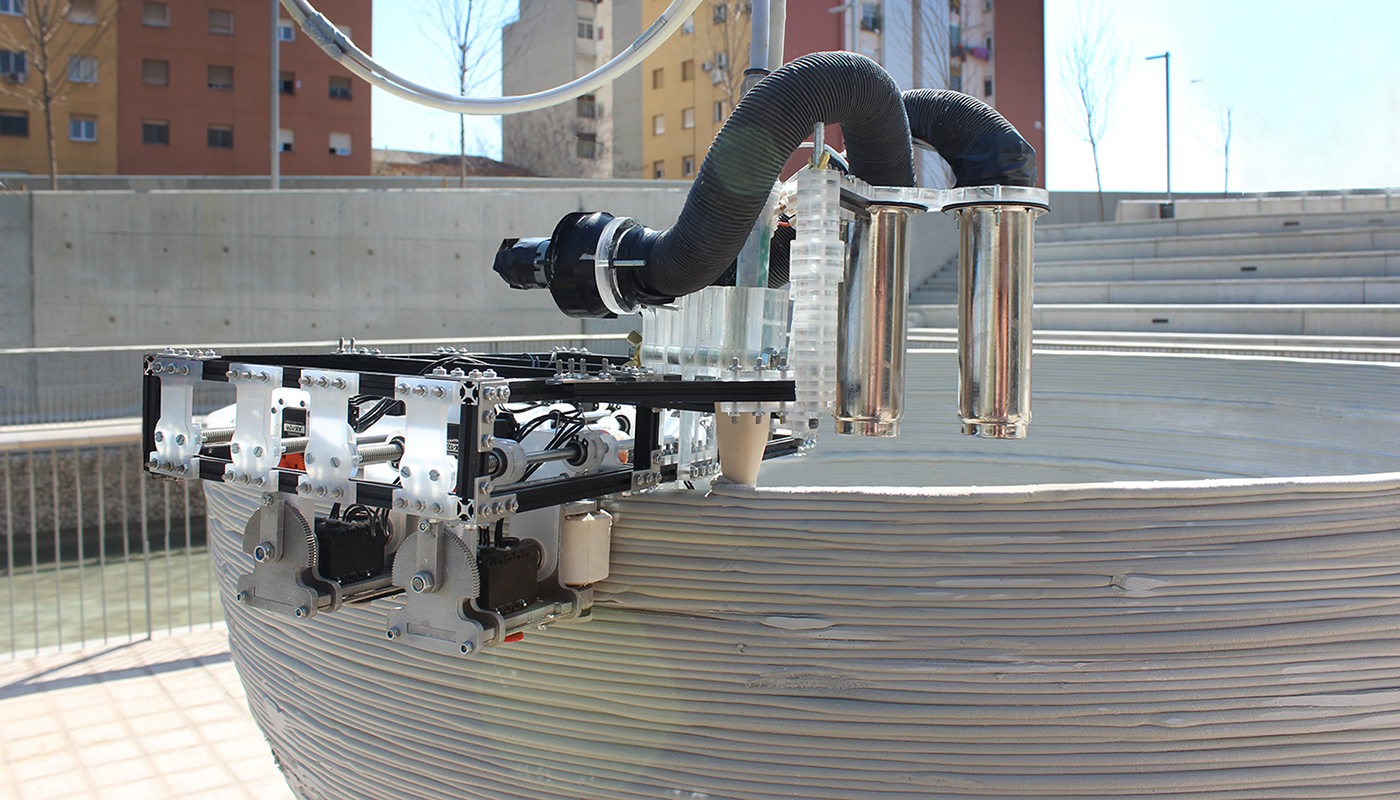
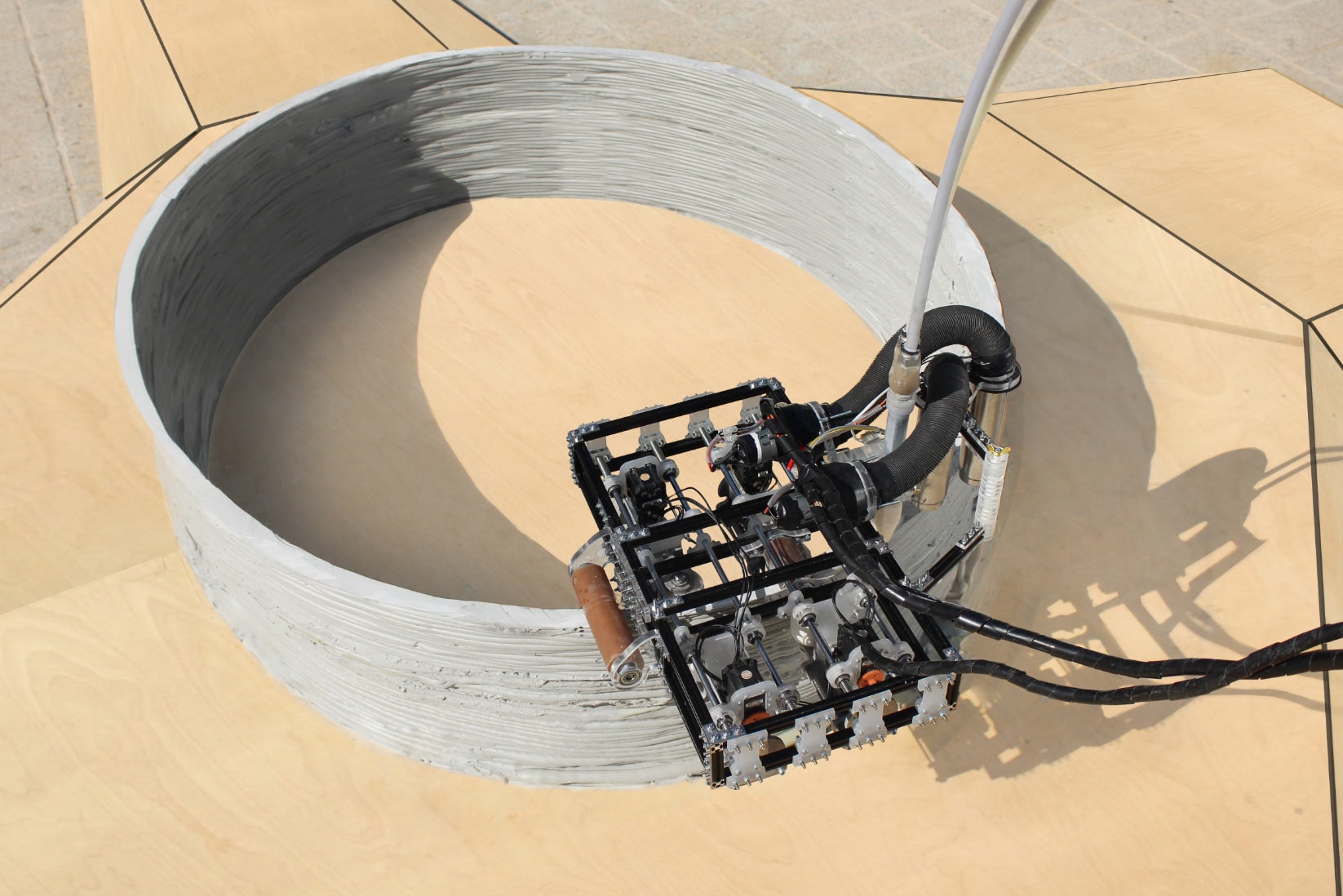
The objective was to develop a family of small-scale construction robots, all mobile and capable of constructing objects far larger than the robot itself. Moreover, each of the robots developed was to perform a diverse task, linked to the different phases of construction, finally working together as a family towards the implementation of a single structural outcome. Hence, instead of the implementation of one large machine, a number of much smaller robots were generated, working independently, but in coordination, towards a single goal.
Specifically, a family of three robots was developed, each robot linked to sensors and a local positioning system. These feed live data into a custom software which allows us to control the robots’ movement and deposition of the material output: fast setting artificial marble.